
项目成果科普性介绍
本项目来源于国家自然科学基金项目“智能网联商用车多车协同控制理论及关键技术(No. U1964202)”,起止时间2020.1-2023.12。本项目工作概括如下。
一、主要研究内容
商用车的纵横耦合非线性和异质性、通信拓扑的可变性以及交通环境的复杂性给商用车队列控制带来了巨大挑战。本项目首先从面向队列控制的车辆纵横耦合动力学建模和网联车辆耦合机理的分析入手,在此基础上设计车辆队列分布式预测控制器,攻克了固定通信拓扑下异质车辆队列分布式预测控制和切换通信拓扑下多队列协同控制的技术瓶颈。
二、研究方法及研究成果
2.1 基于耗散能量的行驶稳定区域求解方法
为求解车辆状态约束,本项目提出一种基于耗散能量的行驶稳定区域求解方法。与经典方法相比较具有很多优点:1)能量耗散是一个定量指标。2)计算公式更简单,计算过程更直接。3)该方法易扩展,可以求解更复杂车辆动力学模型的耗散能量。本项目采用该指标求解了图1所示的项目试验车辆的状态稳定区域。该部分车辆状态及控制稳定区域的求解工作为项目中的模型预测控制器设计提供约束条件,以代替传统控制器设计中根据线性系统理论得到的固定数值的不等式约束。

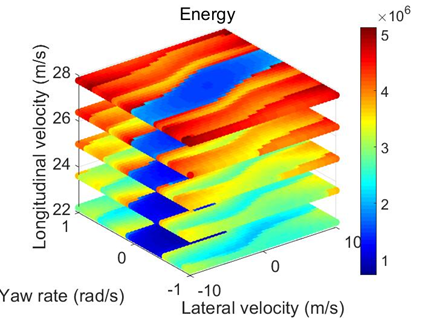
图1 基于耗散能量的东风试验车状态约束求解方法
2.2 异质网联车辆行车安全性、队列稳定性、燃油经济性耦合机理分析
现有研究都是针对同质车辆,而异质车辆队列是组成车队的主流方式。本项目对异质商用车队列行驶气动阻力系数进行仿真研究,分析异质车队最优降阻方式和最佳节油率。研究选用三类不同商用车模型,按照一定比例构建三维仿真模型;选用基于有限元体积法的Fluent作为数值仿真软件,选择标准k-epison湍流模型作为对比;设定固定车速100km/h,选用0.3s车头时距的行驶条件对单车、两车和三车队列进行异质车队的速度场和压力场仿真分析,结果如图2所示。
通过计算域构建、非结构网格划分及评价标准、边界条件设置、求解器控制参数设定等研究,对单车仿真结果进行流场分析,为两车队列及三车队列行驶仿真研究提供参照。在两车及三车队列行驶过程中,对各不同车辆进行排列,设计仿真方案,利用仿真结果进行流场分析、风阻特性分析及燃油经济性分析。仿真结果显示异质商用车队列行驶具有良好的降低风阻、节省燃油的作用,且前车风阻降低率较小,中车及后车风阻系数降低率较大;两车队列整体平均节油率在10% 左右,三车队列整体平均节油率12%-16%;队列形状不同,队列整体平均节油率有所差别,多车队列呈现“钟形”队列形状时节油率最高。考虑到车间距对队列行驶气动特性的影响,选用0.3s、0.5s、1s和2s的车头时距对三车队列进行分析,仿真结果显示随着车间距增加,队列内各车辆风阻系数降低率及节油率下降。
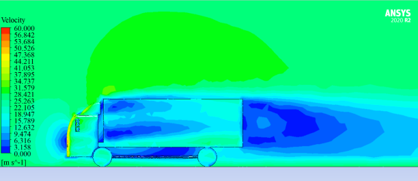
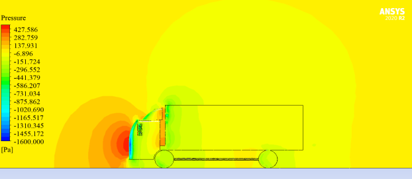
(a) 单车速度云图 (b) 单车压力云图
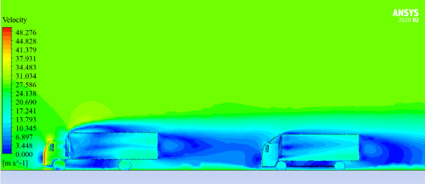

(c) 双车队列速度云图 (d) 双车队列压力云图
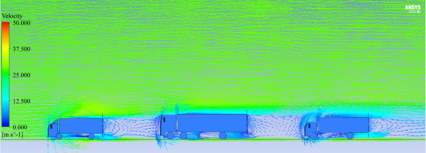
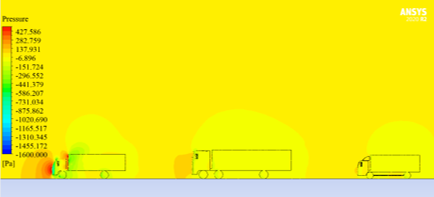
(e) 三车队列速度云图 (f) 三车队列压力云图
图2 车辆队列速度云图及压力云图
2.3 V2V 通信拓扑结构表征方法
首先量化V2V通信的可靠性,通过结合载波监听多点接入/碰撞避免协议对信标性能进行分析,定义考虑信标性能的通信传输概率;然后考虑不可抗干扰和通信距离构建通信信号强度函数,建立考虑通信信号强度和信标性能的通信连接概率函数,用于表征在智能网联环境下车辆在某时刻与其他智能网联车辆建立信息的概率;最后结合代数图论,建立典型拓扑(如PF, TPLF等)下的考虑通信连接概率的V2V通信拓扑模型,如图3是拓扑切换示意图。
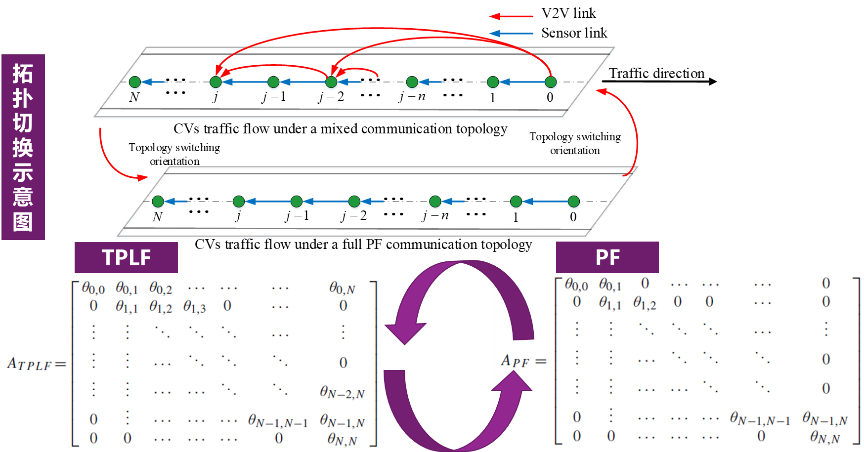
图3 拓扑切换示意图
针对在弯道工况下车辆队列纵横向运动存在的强耦合特性,若采用纵横向解耦的模型设计纵横向独立控制器来控制车辆队列纵横向运动,则忽略了车辆动力学的纵横向耦合运动特性,会影响队列协同控制器的控制性能,导致队列中的车辆超出道路边界。提出一种保证一致性的车辆队列纵横向协同分布式预测控制策略,保证车辆的纵向跟踪性能和横向车道保持性能。车辆队列纵横向协同控制策略结构框图如图4所示,其中上层控制器设计为保证一致性的分布式预测控制器,下层控制器将上层控制器决策出期望纵向力转化为车辆行驶所需的节气门开度与制动压力。为避免求解非线性优化问题,基于Koopman算子理论将非线性车辆动力学近似为“全局”线性模型,并结合车道保持模型,建立了车辆队列线性参变模型;设计纵横向协同分布式预测控制器,通过在分布式预测控制器的局部优化问题中附加终端控制律,终端惩罚函数和终端约束集,保证了局部优化问题的递归可行性,以及车辆队列的渐近一致性,采用交替方向乘子法(Alternating Direction Method of Multipliers,ADMM)算法求解局部优化问题保证算法的实时性。
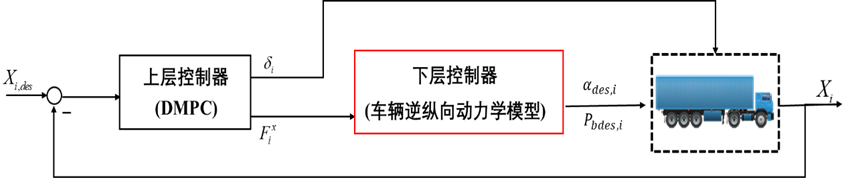
图4 车辆队列纵横向协同控制策略结构框图
Apollo模型车实验平台充分考虑了硬件选型、数据采集与数据处理的需要,确保实验环境贴近实际驾驶情境;通过V2V通信,信息能够在复杂的交通环境中传递;车辆能够接收并处理这些信息,通过CAN总线将控制信号传递给底盘,实现期望的控制目标。结合V2V通信和Apollo实验平台,将仿真验证的算法应用于实际模型车上。通过实验验证,能够更全面地评估控制算法在真实车辆上的性能,提高算法的实用性和适应性,为控制算法实际应用提供支持。
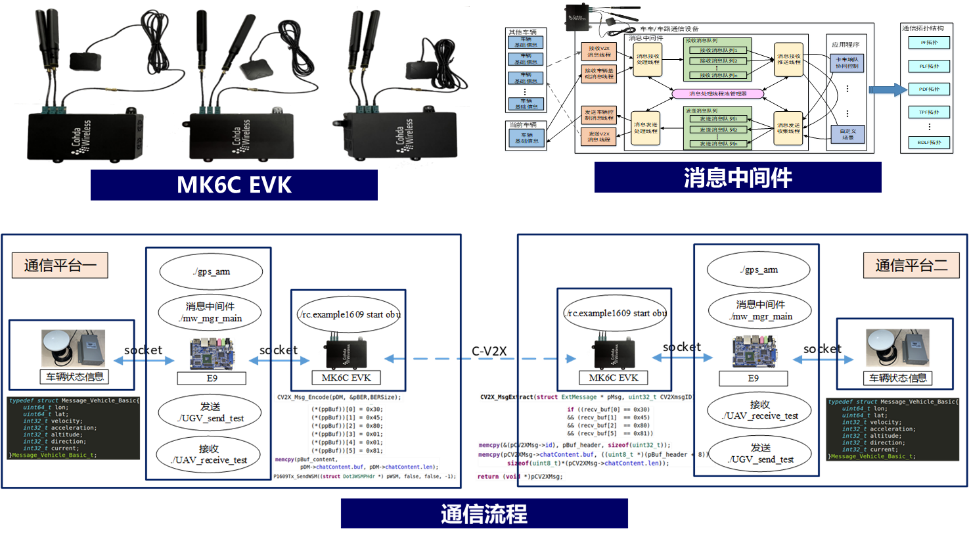
图5 MK6C的通信模块

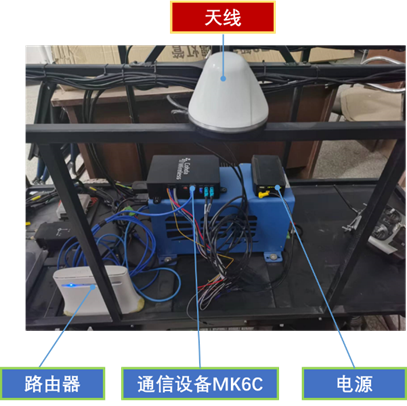
(a)Apollo小车跟随行驶 (b)Apollo通信模块
图6 Apollo验证小车
2.6 东风H19C商用车C-V2X的车-车通信和实车纵向编队控制实验
采集商用车实车数据,辨识商用车的动力学模型及参数。开展商用车之间V2V通信的方式传递信息,在机器人操作系统(Robot Operation System, ROS)环境下的车辆纵向控制器的开发和基于V2V通信的车辆编队纵向控制实验。

图7 东风H19C试验车

图8 轮胎纵向力参数估计
本项目搭建了基于C-V2X的百度Apollo模型车编队实验平台,完成了百度Apollo模型车纵横解耦编队控制和纵横耦合编队预测控制实验。项目执行期间共发表论文87篇,其中SCI检索论文41篇,申报发明专利18项和软件著作权3项,发表专著1部。